
Dynamic Positioning (DP) systems are a mature and well-proven technology. The superyacht industry has embraced DP as a concept, and many large yachts now feature some level of station-keeping capability. However DP is not widely understood within this industry beyond the basic principles, capabilities are frequently over-specified and the resulting impact on the level of installed power is often severe.
This article aims to provide a background to the principles of basic station-keeping, typical thruster arrangements, and how DP is used in practice. Also discussed are the various fundamental methods of controlling the degree of DP capability, along with the impact of implementation on the vessel's design.
Since its first use in the 1960s, the field of Dynamic Positioning has exploded in terms of complexity, reliability and uptake. In recent years some level of station-keeping capability has come to be expected of most large yachts. The level of station keeping specified, and thruster / propulsion system utilized, must be done with careful consideration to minimize the impact on the vessel's overall function as a piece of luxurious real estate.
One capability of a DP system is to 'park' a vessel at sea without an anchor, and have it remain in a fixed position by using computers to automatically control the thrusters. However this is a very energy intensive operation and uses a lot of fuel. This functionality only really comes in useful in deep water, when anchoring would not be feasible. A more common use of the system is in conjunction with an anchor to keep the vessel headed into an incoming swell in order to reduce roll motion or swing range.
For the sake of clarity it is important to make the distinction between DP and station keeping. DP refers to the process whereby a computer controls the various thrusters and propulsors installed on the vessel to result in the desired thrust vector, in response to a joystick input from the bridge. DP systems account for external forces acting upon the vessel, such as wind, waves and current. One common feature of a DP system is a station-keeping function. This is the vessel's capability to react to external loading to maintain a certain position and heading.
One aspect commonly misunderstood is that of class notations for DP-capable vessels. In general terms, higher DP notations relate only to levels of redundancy in the system and not to the DP capability. A DP2 classed vessel has redundancy such that no single fault in an active system would cause loss of position. Higher notations such as DP3 go a step further and require the vessel to tolerate fire or flooding in any one compartment without the system failing. Such levels of redundancy are only required by vessels carrying out operations where a loss of DP capability would pose a high threat of loss of life or environmental damage.
The successful fundamental design of a DP system ensures that the vessel is capable of producing forces and moments to oppose those imparted on it by external environmental factors. In practice this means that the vessel must have a thruster configuration whereby sufficient forces and moments about the vertical axis can be produced. At some point, the environmental factors will overcome the thrust offered by the vessel and the vessel will begin to drift or yaw; the edge of the station-keeping envelope will have been reached.
DP capability analysis involves finding the maximum wind speed at each heading that a vessel is able to maintain position and heading. Typical station-keeping analysis software calculates the wind force and moment at each heading for a specific vessel, and iteratively increases the wind speed until the maximum available thrust is reached. From this an operational envelope is developed, showing the vessel's maximum station-keeping capability at each wind heading.
The typical propulsion and thruster arrangement for large yachts tends to follow a common configuration with twin controllable or fixed pitch propellers and one or two fixed tunnel bow thrusters. Larger yachts may also have a stern thruster, commonly also fixed tunnel thrusters but occasionally retractable azimuthing units. Vessels fitted with fixed pitch propellers often use an azimuthing stern thruster, as the propellers are not usually part of the DP system (due to the low slow-speed torque characteristics of the main engines).
This arrangement is well suited to provide adequate transverse forces and yawing moments for typical yacht operation. It also makes best use of space which has little practical use for luxury areas within the hull; bow thrusters are placed deep in the fore ship, while stern thrusters are typically positioned in the skeg. Where more significant capability is required recourse to a fully azimuthing propulsion train (pods) will deliver a step change in the degree of thrust vectoring available. Such systems are rare in the large yacht field.
Methods of increasing DP capability
Increasing the DP capability of a vessel can be achieved in three distinct ways:
• Increasing the longitudinal or transverse separation between thrusters
• Increasing the range of thrust vectors achievable by a thruster
• Increasing the power available to a thruster
In reality the most common method of incrementally improving the DP performance of a de facto yacht arrangement is to simply increase the power and thrust developed by selecting larger thrusters. However increasing power delivery of the thrusters can have significant impact on the space and volume consumed by associated machinery.
There comes a point when the improvements in DP performance is not proportional to the increase in power level and the impacts outlined above become nonsensical or overly constraining to the design. It is at this point that the adoption of a fully azimuthing propulsion system should be considered.
Lateral has internally developed software (DPCalc) which predicts the station-keeping capability of a vessel, based on specific environmental conditions, thruster arrangements and derived wind loading coefficients.
The position, orientation and maximum thrust of the various propulsors on the vessel (bow and stern thrusters, and main propellers) are then used in a quadratic solver to find the most efficient combination of thrust allocation (based on minimizing overall thrust magnitude) that will counter the external forces, reducing the overall force and moments acting on the vessel to zero.
Case study
To quantify the impact that an increasing DP requirement can have on a yacht's design, a case study was conducted on a representative motoryacht. The vessel studied is a 112m LOA vessel, with diesel-mechanical CPP's as prime-movers, an electrical bow thruster and a retractable electrically driven stern thruster.
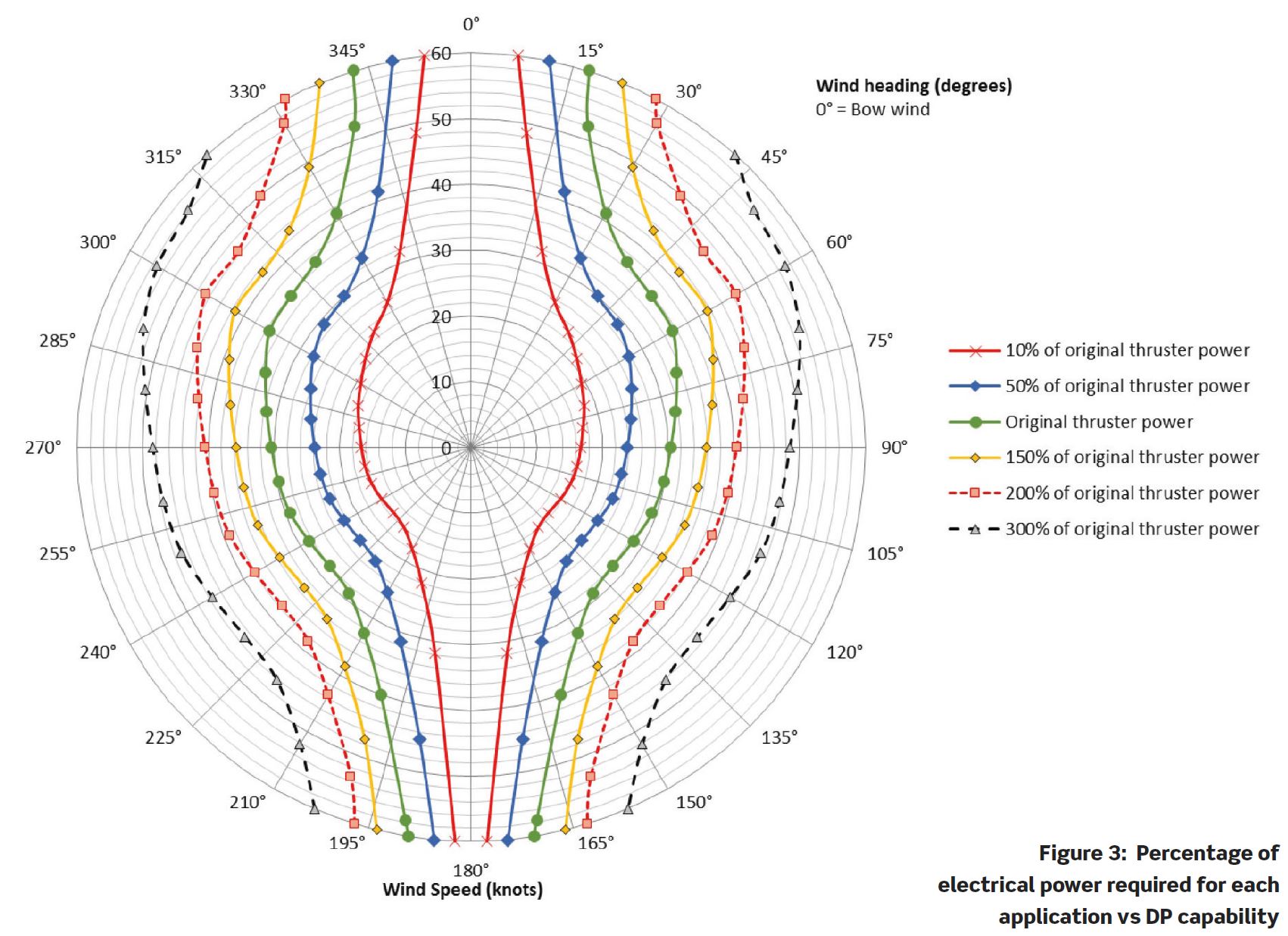
Using DPCalc, the station-keeping capability of the yacht was calculated with the thrusters at 10%, 50%, 150%, 200% and 300% of the original designed power. Figure 2 shows the polar capability plot of the vessel as the size of the thrusters are increased. For the 100% baseline case, the installed thrusters and generators are predicted to provide a minimum beam wind speed capacity of approximately 30.4kt. By increasing the rated power of the thruster units by 50%, and increasing the installed electrical generating capacity by the equivalent of an extra generator, this speed can be increased to around 35.8kt. Similarly, by reducing the thruster sizes by 50% the capacity will drop by 6.6kn, to 23.8kt.
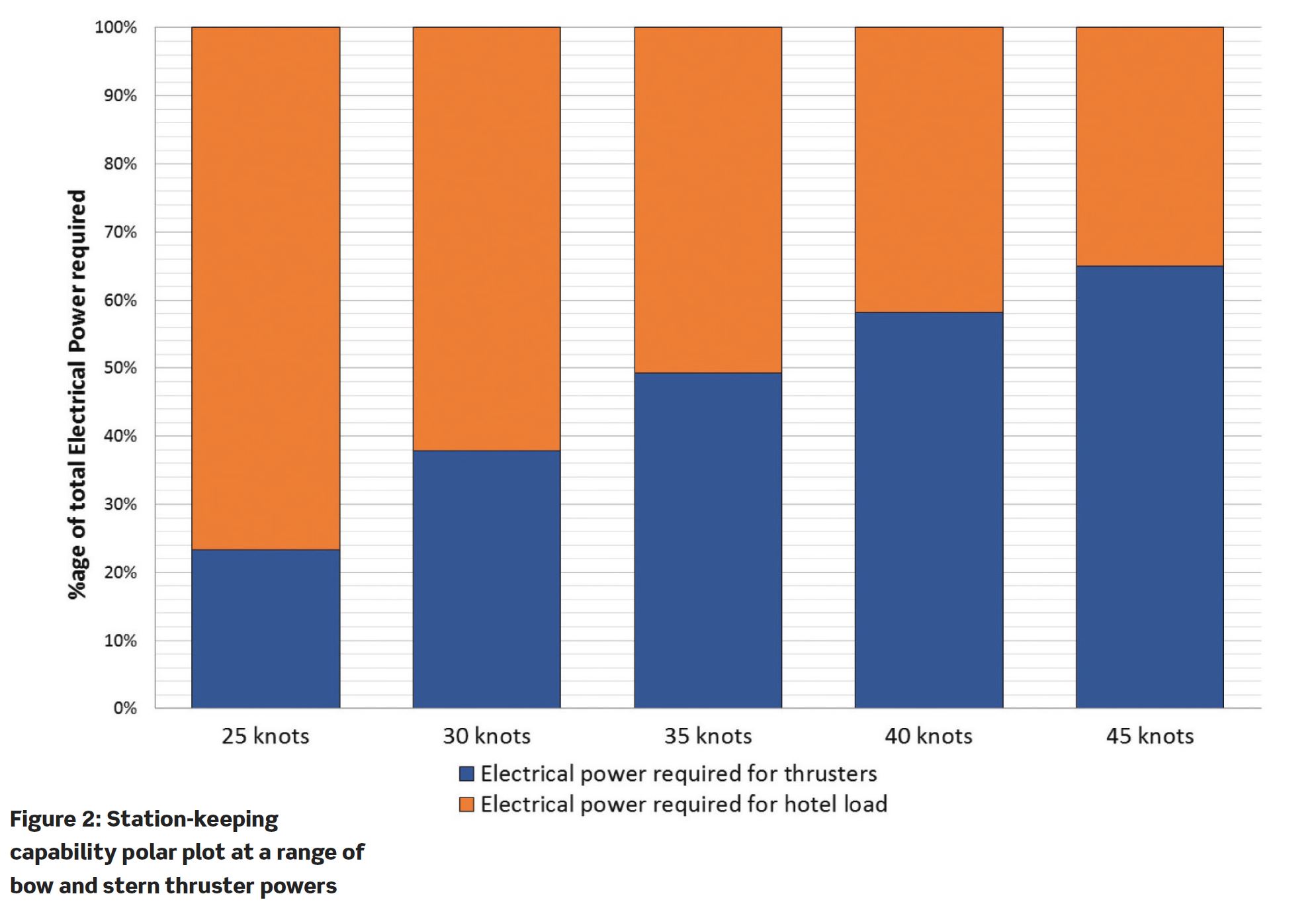
Maximum installed electrical generating capacity is principally determined by how much power is required to drive the thrusters on top of the normal hotel load. Therefore the DP capability specified can have a very significant impact on the number and size of generators installed. The higher the DP specification, the more electrical machinery the vessel carries purely for DP operations. Figure 3 shows the percentage of total installed electrical generation power that is required to satisfy the hotel and DP load. While some level of redundancy in the system is required (also allowing for hours swapping on generators), the majority of the remaining installed capacity is installed for thruster operations only. Figure 3 therefore shows that for a specification calling for a station-keeping capability in a beam wind of 35kt,
On this particular vessel any increase in the size of the thruster tunnel or drive unit would require a bulkhead rearrangement, increasing the length of the thruster space. The size and weight of the associated electrical equipment is approximately proportional to its rated power. It quickly becomes clear that simply increasing the power of the thrusters has many knock-on effects downstream, effecting multiple systems and ultimately the space in the vessel occupied by technical equipment, which in turn detracts from the luxury areas of the yacht.
Conclusions
Whilst DP systems are becoming more commonplace in yachts, they are rarely used in a purely station-keeping sense. Nevertheless the station-keeping capability of the yacht is a good measure by which to benchmark the vessel's overall DP performance.
A significant increase in DP capability is seen to have a detrimental impact on multiple aspects of the vessel's design if the implications of such a system are not fully understood. The level of DP specification should be a carefully considered parameter, with the practical value of a more capable system being evaluated against the various design compromises necessary in its delivery.
For more information, take a look at our technical paper below.